



Description
Description
- Unitree G1-D Standard D Humanoid Robot Platform (Revo 2 Basic Hands)
- Multi-sensor perception system
- Secondary development supported; visualization computer included
- Fixed-base dual-arm humanoid robot
- BrainCo five-finger dexterous hands (w/ Revo 2 Basic & RGB camera)
- Total degrees of freedom: 29
.unitree-g1-d-top-image.rs-section{ position:relative; overflow:hidden; padding:0; border-radius:var(–g1dti-radius,15px); background:var(–g1dti-bg,#000); color:var(–g1dti-tc,#fff);}/* Background image */.unitree-g1-d-top-image.rs-section::before{ content:””; position:absolute; inset:0; z-index:0; background:var(–g1dti-bg-img) var(–g1dti-bg-pos,center) / cover no-repeat; transform:scale(1.02);}/* Overlay feather */.unitree-g1-d-top-image.rs-section::after{ content:””; position:absolute; inset:0; z-index:1; background:linear-gradient( 90deg, var(–g1dti-ov-l, rgba(0,0,0,.62)) 0%, var(–g1dti-ov-m, rgba(0,0,0,.30)) 34%, var(–g1dti-ov-r, rgba(0,0,0,.10)) 52%, transparent 72% );}/* Content grid */.unitree-g1-d-top-image .hero-wrap{ position:relative; z-index:2; width:100%; max-width:var(–g1dti-content-max,1200px); margin:0 auto; padding:var(–g1dti-pad, clamp(22px, 4vw, 56px)); min-height:var(–g1dti-minh,620px); display:grid; grid-template-columns:minmax(0, 1.2fr) minmax(0, .8fr); gap:var(–g1dti-gap,28px); align-items:center;}/* Text */.unitree-g1-d-top-image .hero-copy{ min-width:0; text-align:var(–g1dti-ta,left); text-shadow:0 2px 10px rgba(0,0,0,.55);}.unitree-g1-d-top-image .hero-kicker{ margin:0 0 .5rem 0; font-size:clamp(12px, 1.3vw, 14px); letter-spacing:.06em; text-transform:uppercase; opacity:.9;}.unitree-g1-d-top-image .hero-title{ margin:0; font-size:clamp(28px, 4vw, 44px); line-height:1.1;}.unitree-g1-d-top-image .hero-subtitle{ margin:.8rem 0 0 0; max-width:52ch; font-size:clamp(14px, 1.8vw, 18px); line-height:1.35; opacity:.92;}/* Right media (kept exactly like before; hidden on mobile) */.unitree-g1-d-top-image .hero-media{ min-width:0; display:flex; justify-content:flex-end; align-items:center;}.unitree-g1-d-top-image .hero-media img{ width:min(420px, 100%); height:auto; display:block; margin:0; border-radius:0; filter:drop-shadow(0 18px 40px rgba(0,0,0,.35));}/* Mobile */@media (max-width:900px){ .unitree-g1-d-top-image.rs-section::after{ background:linear-gradient( 90deg, var(–g1dti-ov-l-m, rgba(0,0,0,.68)) 0%, var(–g1dti-ov-m-m, rgba(0,0,0,.34)) 36%, var(–g1dti-ov-r-m, rgba(0,0,0,.12)) 54%, transparent 74% ); } .unitree-g1-d-top-image .hero-wrap{ grid-template-columns:1fr; align-items:end; padding:var(–g1dti-pad-m,22px); min-height:var(–g1dti-minh-m,520px); } .unitree-g1-d-top-image .hero-copy{ padding-bottom:var(–g1dti-text-bottom-m,14px); } .unitree-g1-d-top-image .hero-media{ display:none; } .unitree-g1-d-top-image .hero-title{ font-size:clamp(22px, 7vw, 34px); }}Data & TrainingFull-Stack Platform
for Humanoid Robot .rs-section.core-components{ background:var(–g1dcc-bg,#fff); border-radius:var(–g1dcc-radius,15px); padding:var(–g1dcc-pad,30px); color:var(–g1dcc-tc,#222);}.core-components .cc-heading{ margin:0 0 26px; text-align:center; font-weight:700; font-size:clamp(20px, 2.2vw, 28px); letter-spacing:.2px;}.core-components .cc-grid{ display:grid; grid-template-columns:repeat(3, minmax(0, 1fr)); gap:0; align-items:stretch;}.core-components .cc-col{ min-width:0; padding:var(–g1dcc-col-pad, 0 34px); display:flex; flex-direction:column; align-items:center; justify-content:flex-start; text-align:center;}/* separators */.core-components .cc-col + .cc-col{ border-left:1px solid var(–g1dcc-sep,#e6e8ee);}.core-components .cc-icon{ width:var(–g1dcc-icon,48px); height:var(–g1dcc-icon,48px); display:block; object-fit:contain; margin:0 0 14px;}.core-components .cc-title{ margin:0 0 10px; font-weight:700; font-size:clamp(15px, 1.2vw, 18px); line-height:1.2;}.core-components .cc-desc{ margin:0; max-width:340px; font-size:clamp(12px, 1vw, 13.5px); line-height:1.55; color:var(–g1dcc-muted,#7a8394);}@media (max-width:650px){ .core-components .cc-grid{ grid-template-columns:1fr; } .core-components .cc-col{ padding:18px 10px; } .core-components .cc-col + .cc-col{ border-left:0; border-top:1px solid var(–g1dcc-sep,#e6e8ee); } .core-components .cc-desc{ max-width:520px; }}Core Building Blocks High-Output Humanoid Robot
High-Output Humanoid Robot
Proprietary humanoid platforms built end-to-end with in-house actuators, gearsets, encoders, and integrated sensing.
 Efficient Data Collection Suite
Efficient Data Collection Suite
A single workflow covering the entire data lifecycle: capture, processing, annotation, validation, and dataset asset management.
 End-to-End Training & Inference Toolkit
End-to-End Training & Inference Toolkit
Supports distributed training, custom model creation, and smooth deployment, with compatibility across leading open-source frameworks.
 Expanded Working
Expanded Working
Envelope →Expanded Working
EnvelopeMobile Operation: Uses a mobile lifting architecture that integrates wheels with a lifting mechanismVertical Workspace: 0–2mWaist ROM (Z): ±155°Waist ROM (Y): -2.5° ~ +135°
 Faster, Low-Latency
Faster, Low-Latency
Control →Faster, Low-Latency
ControlLifting Accuracy: ±0.5mmEnd-Effector Gripper Accuracy: ±0.1mmNote: Accuracy can vary depending on the end-effector configuration.System Teleoperation Latency: <100msSampling Rate: 60Hz
 High-DOF Robot
High-DOF Robot
Platform →High-DOF Robot
PlatformTotal Degrees of FreedomRobot DOF (Excl. End-Effector): 19Arm Degrees of Freedom: 7×2Waist Degrees of Freedom: 2Column Degrees of Freedom: 1Base Degrees of Freedom: 2(for motorized based only)/* ========================================================= 3-pane (MFG-style) — isolated vars, no H tags ========================================================= *//* —- RAIL —- */.rs-appsc-rail{ –g1d3p-rail-max:none; –g1d3p-rail-pad->Template-Driven Workflows for Faster Collection
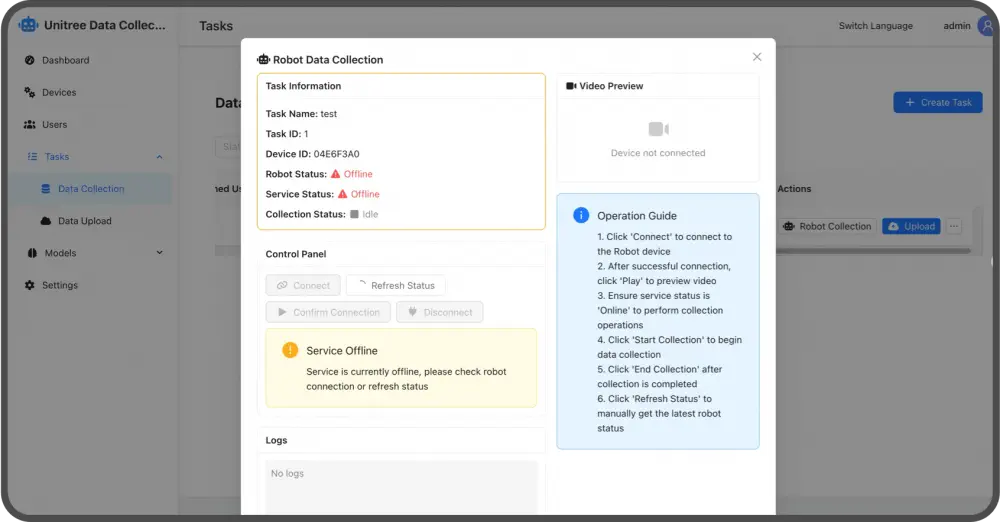
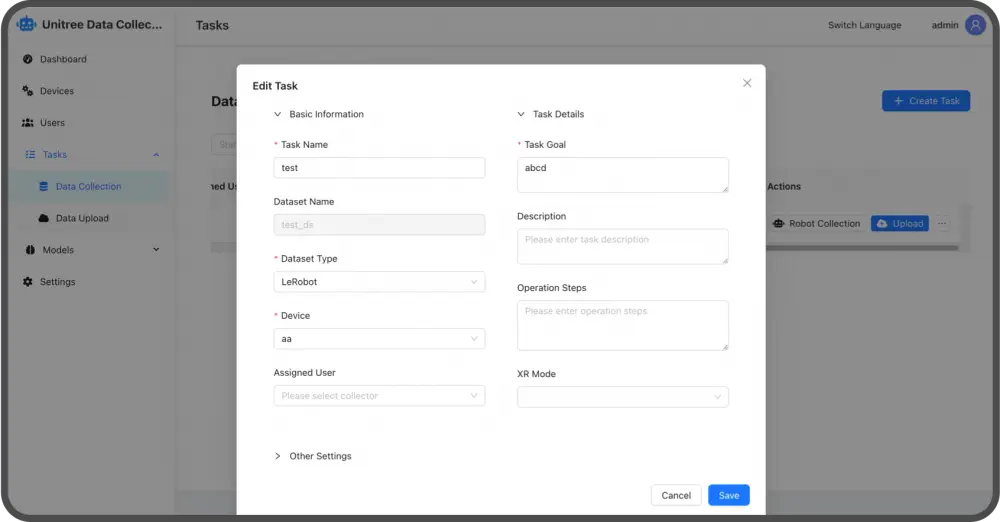
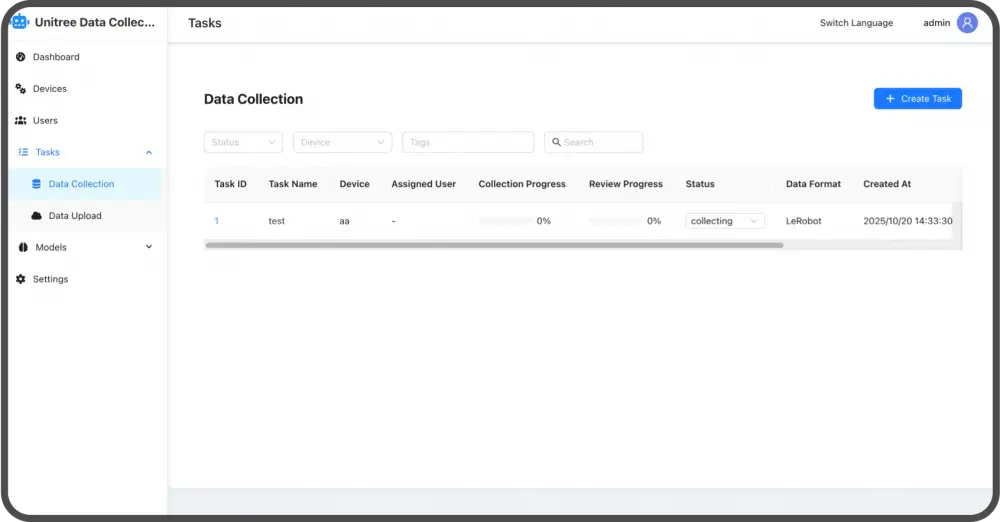
Combines project coordination, task assignment, progress monitoring, and status reporting into one workspace. Using reusable templates, collection tasks can be created in a single click. Real-time visibility across the pipeline improves collaboration and keeps data acquisition running smoothly.
 Flexible Setups Across Platforms & End Effectors
Flexible Setups Across Platforms & End Effectors
Supports data capture across multiple robot platforms and end-effector configurations. Strong standardization turns inputs from diverse devices into consistent, high-quality training-ready datasets through an end-to-end workflow.
 Scalable, High-Concurrency Architecture
Scalable, High-Concurrency Architecture
Designed to coordinate hundreds of robots performing synchronized data collection. With high-concurrency services and load-balanced scheduling, the platform reliably ingests and processes large, real-time data streams.
 Always-On Collection, Stable & Reliable
Always-On Collection, Stable & Reliable
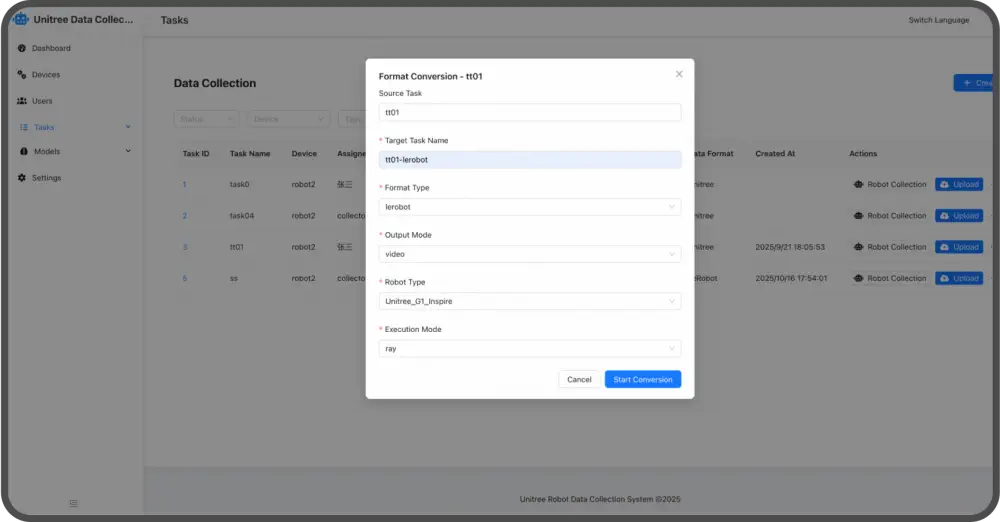
Built on a highly available service foundation to support dependable 24/7 collection. Broad format compatibility lets outputs be used directly or converted into widely adopted training formats, speeding up R&D cycles.
/* ========================================================= Streamlined Data Acquisition Tools (scoped + WYSIWYG-safe) – No H tags – All vars prefixed: –g1d-daq-* ========================================================= */ .unitree-g1-d-data-aquisition-tools{ background:var(–g1d-daq-area-bg); border-radius:var(–g1d-daq-area-radius); padding:var(–g1d-daq-pad-y) var(–g1d-daq-pad-x); } .unitree-g1-d-data-aquisition-tools .daq-wrap{ max-width:var(–g1d-daq-maxw); margin:0 auto; } .unitree-g1-d-data-aquisition-tools .daq-head{ text-align:center; margin:0 0 clamp(18px,2.4vw,28px) 0; } .unitree-g1-d-data-aquisition-tools .daq-head-title{ margin:0; color:var(–g1d-daq-title); font-weight:750; letter-spacing:.2px; line-height:1.18; font-size:clamp(22px,2.6vw,34px); } .unitree-g1-d-data-aquisition-tools .daq-head p{ margin:10px auto 0; max-width:860px; color:var(–g1d-daq-sub); font-size:clamp(13px,1.25vw,15px); line-height:1.6; } .unitree-g1-d-data-aquisition-tools .daq-grid{ display:grid; gap:var(–g1d-daq-grid-gap); grid-template-columns:repeat(2, minmax(0, 1fr)); } .unitree-g1-d-data-aquisition-tools .daq-card{ background:var(–g1d-daq-card-bg); border:1px solid var(–g1d-daq-card-bd); border-radius:var(–g1d-daq-card-radius); box-shadow:var(–g1d-daq-card-shadow); padding:var(–g1d-daq-card-pad); min-height:140px; } .unitree-g1-d-data-aquisition-tools .daq-icon{ width:var(–g1d-daq-icon-box); height:var(–g1d-daq-icon-box); border-radius:var(–g1d-daq-icon-radius); background:var(–g1d-daq-icon-bg); display:flex; align-items:center; justify-content:center; margin:0 0 12px 0; } .unitree-g1-d-data-aquisition-tools .daq-icon img{ width:var(–g1d-daq-icon-img) !important; height:var(–g1d-daq-icon-img) !important; display:block; } .unitree-g1-d-data-aquisition-tools .daq-title{ margin:0 0 10px 0; color:var(–g1d-daq-title); font-weight:750; font-size:16px; line-height:1.25; } .unitree-g1-d-data-aquisition-tools .daq-body{ margin:0; color:var(–g1d-daq-sub); font-size:13.5px; line-height:1.6; } @media (max-width:768px){ .unitree-g1-d-data-aquisition-tools{ padding:26px 16px; } .unitree-g1-d-data-aquisition-tools .daq-grid{ grid-template-columns:1fr; } .unitree-g1-d-data-aquisition-tools .daq-card{ padding:var(–g1d-daq-card-pad-m); } } #g1d-data-pipeline{ width:100%; background:var(–g1ddp-bg); padding:var(–g1ddp-pad-y) var(–g1ddp-pad-x); border-radius:var(–g1ddp-radius); overflow:hidden; box-sizing:border-box; } #g1d-data-pipeline, #g1d-data-pipeline *{ box-sizing:border-box; } #g1d-data-pipeline .rs-dp-inner{ max-width:var(–g1ddp-inner-max); margin:0 auto; font-family:system-ui,-apple-system,Segoe UI,Roboto,Arial,sans-serif; color:var(–g1ddp-text); } #g1d-data-pipeline .rs-dp-titlewrap{ text-align:center; margin:0 0 18px; } #g1d-data-pipeline .rs-dp-title{ display:inline-block; background:var(–g1ddp-accent); color:#fff; font-weight:700; font-size:14px; line-height:1; padding:8px 14px; border-radius:999px; } #g1d-data-pipeline .rs-dp-radio{ position:absolute; left:-9999px; opacity:0; pointer-events:none; } #g1d-data-pipeline .rs-dp-steps{ list-style:none; display:flex; justify-content:space-between; align-items:flex-start; gap:10px; padding:0; margin:0 auto 18px; position:relative; max-width:980px; } /* dotted connector line (like the screenshot) */ #g1d-data-pipeline .rs-dp-steps::before{ content:””; position:absolute; left:4%; right:4%; top:14px; height:0; border-top:2px dashed var(–g1ddp-line); z-index:0; } #g1d-data-pipeline .rs-dp-step{ flex:1; min-width:0; text-align:center; position:relative; z-index:1; } #g1d-data-pipeline .rs-dp-dot{ width:28px;height:28px;border-radius:999px; margin:0 auto 6px; display:grid;place-items:center; font-weight:800;font-size:13px; color:#fff; background:var(–g1ddp-muted); box-shadow:0 1px 0 rgba(0,0,0,.08); } #g1d-data-pipeline .rs-dp-label{ font-size:12px; line-height:1.15; color:var(–g1ddp-muted); font-weight:600; } #g1d-data-pipeline .rs-dp-stage{ position:relative; max-width:var(–g1ddp-imgw); margin:0 auto; } #g1d-data-pipeline .rs-dp-imgwrap{ position:relative; width:100%; margin:0 auto; } #g1d-data-pipeline .rs-dp-imgwrap::before{ content:””; display:block; padding-top:var(–g1ddp-imgH); } #g1d-data-pipeline .rs-dp-imgwrap img{ position:absolute; inset:0; width:100%; height:100%; object-fit:contain; opacity:0; transition:opacity .18s ease-in-out; will-change:opacity; } #g1d-data-pipeline .rs-dp-arrow{ position:absolute; top:50%; transform:translateY(-50%); width:var(–g1ddp-arrow); height:var(–g1ddp-arrow); border-radius:999px; border:1px solid var(–g1ddp-line); background:#fff; box-shadow:0 1px 0 rgba(0,0,0,.06); display:none; align-items:center; justify-content:center; cursor:pointer; user-select:none; z-index:3; } #g1d-data-pipeline .rs-dp-arrow span{ font-size:22px; line-height:1; color:#111; } #g1d-data-pipeline .rs-dp-arrow:hover{ filter:brightness(.98); } #g1d-data-pipeline .rs-dp-arrow:active{ transform:translateY(-50%) scale(.98); } #g1d-data-pipeline .rs-dp-arrow.prev{ left:-58px; } #g1d-data-pipeline .rs-dp-arrow.next{ right:-58px; } /* Active highlight */ #g1d-data-pipeline #g1ddp-s1:checked ~ .rs-dp-steps .s1 .rs-dp-dot, #g1d-data-pipeline #g1ddp-s2:checked ~ .rs-dp-steps .s2 .rs-dp-dot, #g1d-data-pipeline #g1ddp-s3:checked ~ .rs-dp-steps .s3 .rs-dp-dot, #g1d-data-pipeline #g1ddp-s4:checked ~ .rs-dp-steps .s4 .rs-dp-dot, #g1d-data-pipeline #g1ddp-s5:checked ~ .rs-dp-steps .s5 .rs-dp-dot, #g1d-data-pipeline #g1ddp-s6:checked ~ .rs-dp-steps .s6 .rs-dp-dot{ background:var(–g1ddp-accent); } #g1d-data-pipeline #g1ddp-s1:checked ~ .rs-dp-steps .s1 .rs-dp-label, #g1d-data-pipeline #g1ddp-s2:checked ~ .rs-dp-steps .s2 .rs-dp-label, #g1d-data-pipeline #g1ddp-s3:checked ~ .rs-dp-steps .s3 .rs-dp-label, #g1d-data-pipeline #g1ddp-s4:checked ~ .rs-dp-steps .s4 .rs-dp-label, #g1d-data-pipeline #g1ddp-s5:checked ~ .rs-dp-steps .s5 .rs-dp-label, #g1d-data-pipeline #g1ddp-s6:checked ~ .rs-dp-steps .s6 .rs-dp-label{ color:var(–g1ddp-text); } /* Show selected image */ #g1d-data-pipeline #g1ddp-s1:checked ~ .rs-dp-stage .img1{ opacity:1; } #g1d-data-pipeline #g1ddp-s2:checked ~ .rs-dp-stage .img2{ opacity:1; } #g1d-data-pipeline #g1ddp-s3:checked ~ .rs-dp-stage .img3{ opacity:1; } #g1d-data-pipeline #g1ddp-s4:checked ~ .rs-dp-stage .img4{ opacity:1; } #g1d-data-pipeline #g1ddp-s5:checked ~ .rs-dp-stage .img5{ opacity:1; } #g1d-data-pipeline #g1ddp-s6:checked ~ .rs-dp-stage .img6{ opacity:1; } /* Show correct arrows */ #g1d-data-pipeline #g1ddp-s1:checked ~ .rs-dp-stage .prev.p1, #g1d-data-pipeline #g1ddp-s1:checked ~ .rs-dp-stage .next.n1{ display:flex; } #g1d-data-pipeline #g1ddp-s2:checked ~ .rs-dp-stage .prev.p2, #g1d-data-pipeline #g1ddp-s2:checked ~ .rs-dp-stage .next.n2{ display:flex; } #g1d-data-pipeline #g1ddp-s3:checked ~ .rs-dp-stage .prev.p3, #g1d-data-pipeline #g1ddp-s3:checked ~ .rs-dp-stage .next.n3{ display:flex; } #g1d-data-pipeline #g1ddp-s4:checked ~ .rs-dp-stage .prev.p4, #g1d-data-pipeline #g1ddp-s4:checked ~ .rs-dp-stage .next.n4{ display:flex; } #g1d-data-pipeline #g1ddp-s5:checked ~ .rs-dp-stage .prev.p5, #g1d-data-pipeline #g1ddp-s5:checked ~ .rs-dp-stage .next.n5{ display:flex; } #g1d-data-pipeline #g1ddp-s6:checked ~ .rs-dp-stage .prev.p6, #g1d-data-pipeline #g1ddp-s6:checked ~ .rs-dp-stage .next.n6{ display:flex; } @media (max-width:720px){ #g1d-data-pipeline .rs-dp-steps{ gap:6px; } #g1d-data-pipeline .rs-dp-label{ font-size:11px; } #g1d-data-pipeline .rs-dp-arrow.prev{ left:8px; } #g1d-data-pipeline .rs-dp-arrow.next{ right:8px; } } Data Collection Pipeline
- 1 Create New
Data Collection
Tasks - 2 Task Updates
and
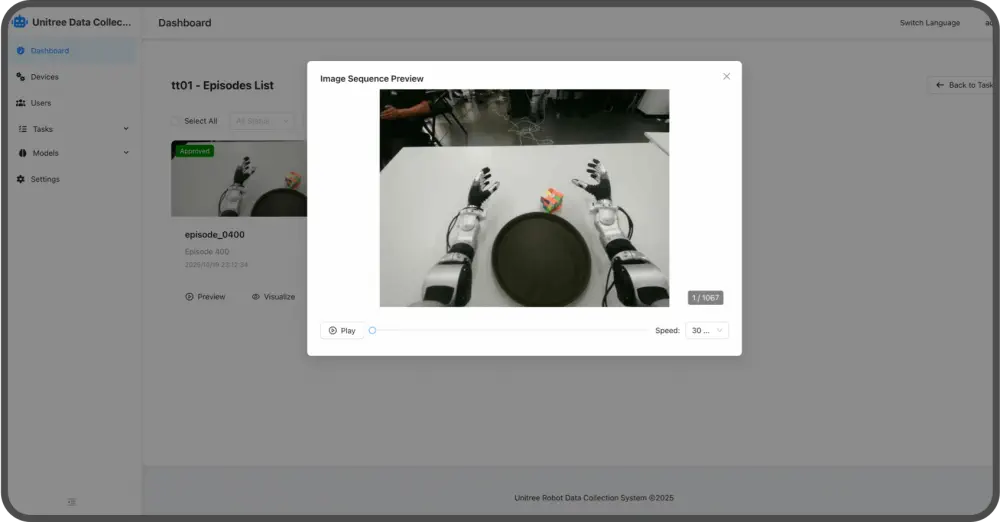
Assignment - 3 Data Capture
and
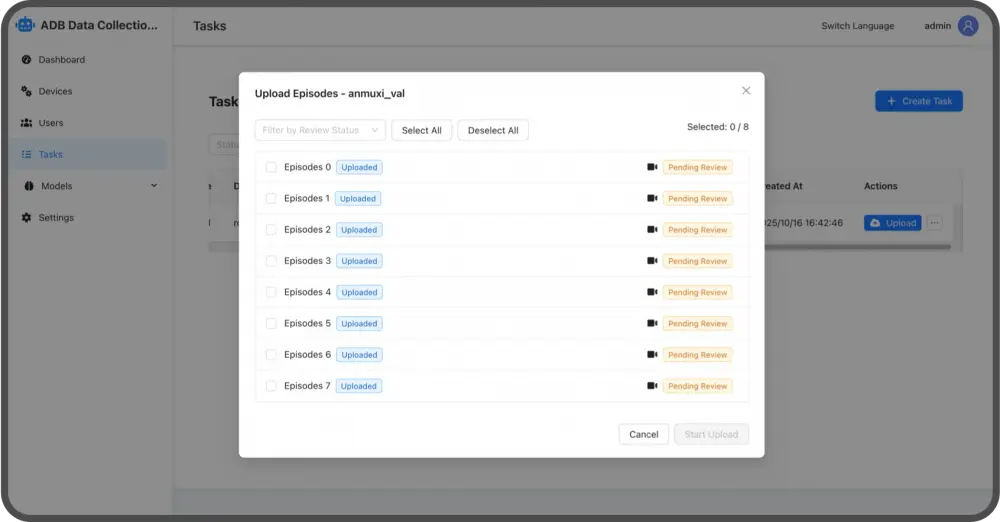
Annotation - 4 Upload Data
and Review - 5 Data Archiving
- 6 Dataset Export
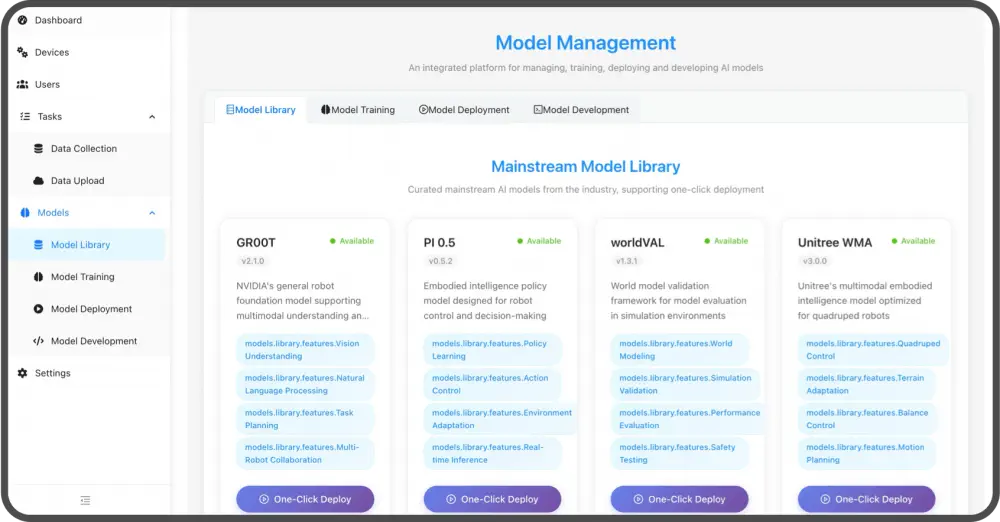
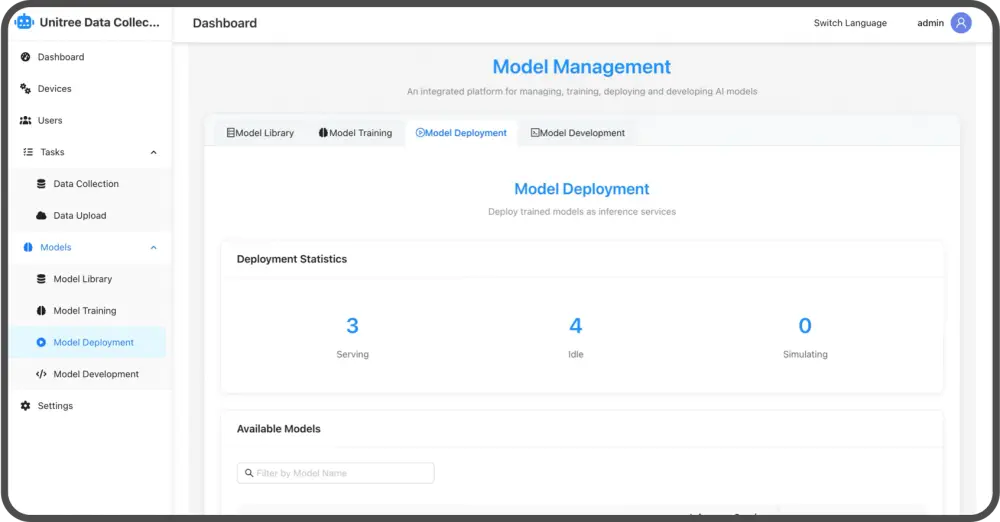
 Full-Stack Model Training & Inference Tools
Full-Stack Model Training & Inference Tools
Covers the complete workflow from data preparation to one-click deployment. The platform integrates smoothly with widely used open-source robotics model frameworks.
 Broad Ecosystem with Popular Model Compatibility
Broad Ecosystem with Popular Model Compatibility
An open model ecosystem with built-in community datasets and support for training on open-source datasets. It also provides deep integration with leading open-source models such as PI and GROOT.
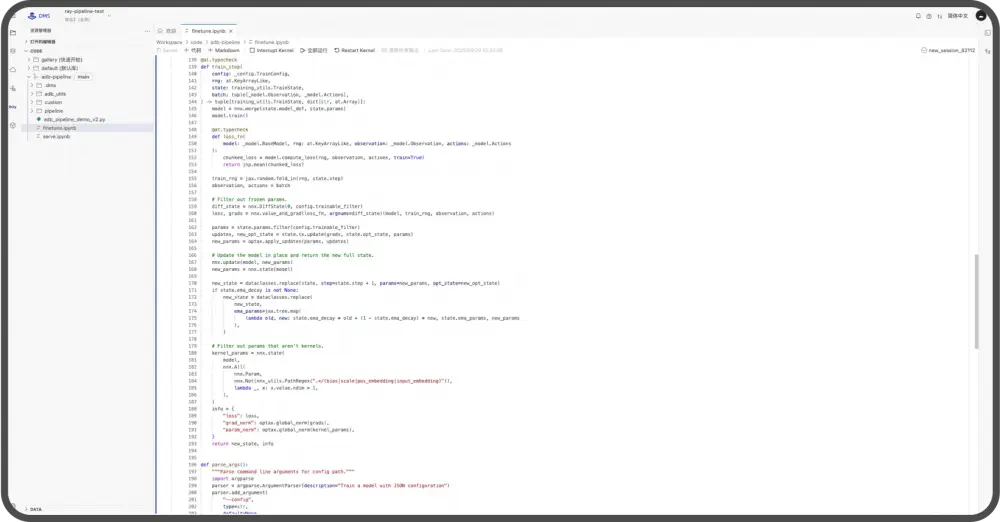
 Simulation Suite for Fast Model Validation
Simulation Suite for Fast Model Validation
Includes a high-fidelity, high-precision 3D asset library. By building realistic simulation scenes, it quickly produces comprehensive evaluation plans to support algorithm verification.
 Out-of-the-Box Experience for Quick Rollout
Out-of-the-Box Experience for Quick Rollout
Ready to deploy immediately, reducing setup time. Kick off development with “one-click training,” use integrated simulation for reliable evaluation, and transition smoothly from algorithms to real-world machines.
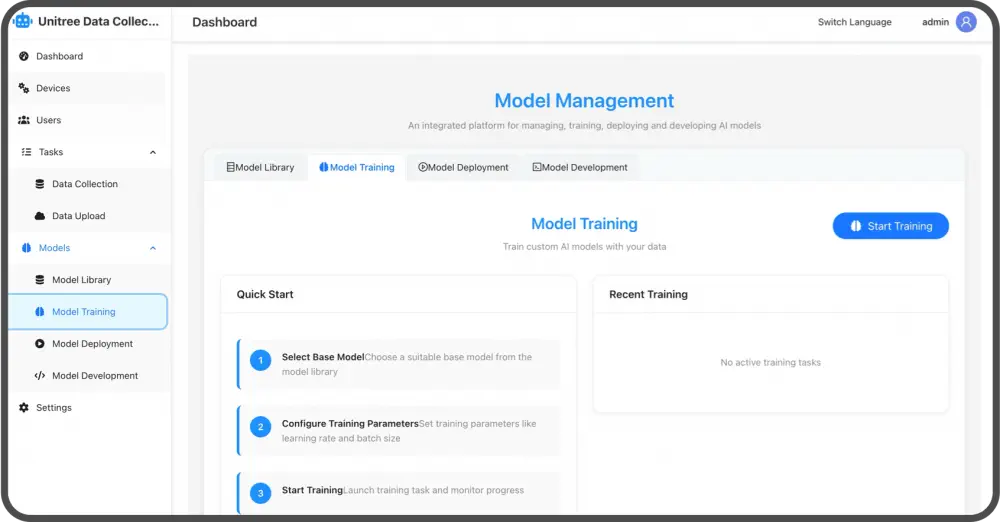
 High-Efficiency Distributed Training
High-Efficiency Distributed Training
Built on a high-performance distributed training stack, enabling elastic task scheduling and parallel acceleration. It scales dynamically with available resources, achieving up to 90% GPU utilization.
/* ========================================================= Training & Inference Tools – IDENTICAL layout + styling rules as Data Acquisition Tools – Different namespace vars: –g1dti-* – No H tags ========================================================= */ .g1-d-training-inference-tools{ background:var(–g1dti-area-bg); border-radius:var(–g1dti-area-radius); padding:var(–g1dti-pad-y) var(–g1dti-pad-x); } .g1-d-training-inference-tools .ti-wrap{ max-width:var(–g1dti-maxw); margin:0 auto; } .g1-d-training-inference-tools .ti-head{ text-align:center; margin:0 0 clamp(18px,2.4vw,28px) 0; } /* Matches the DAQ block’s heading styling exactly */ .g1-d-training-inference-tools .ti-head-title{ margin:0; color:var(–g1dti-title); font-weight:750; letter-spacing:.2px; line-height:1.18; font-size:clamp(22px,2.6vw,34px); } /* Matches the DAQ block’s intro paragraph styling exactly */ .g1-d-training-inference-tools .ti-head p{ margin:10px auto 0; max-width:860px; color:var(–g1dti-sub); font-size:clamp(13px,1.25vw,15px); line-height:1.6; } .g1-d-training-inference-tools .ti-grid{ display:grid; gap:var(–g1dti-grid-gap); grid-template-columns:repeat(2, minmax(0, 1fr)); } .g1-d-training-inference-tools .ti-card{ background:var(–g1dti-card-bg); border:1px solid var(–g1dti-card-bd); border-radius:var(–g1dti-card-radius); box-shadow:var(–g1dti-card-shadow); padding:var(–g1dti-card-pad); min-height:140px; } /* Matches DAQ icon box */ .g1-d-training-inference-tools .ti-icon{ width:var(–g1dti-icon-box); height:var(–g1dti-icon-box); border-radius:var(–g1dti-icon-radius); background:var(–g1dti-icon-bg); display:flex; align-items:center; justify-content:center; margin:0 0 12px 0; } .g1-d-training-inference-tools .ti-icon img{ width:var(–g1dti-icon-img) !important; height:var(–g1dti-icon-img) !important; display:block; } /* Matches DAQ title/body typography */ .g1-d-training-inference-tools .ti-title{ margin:0 0 10px 0; color:var(–g1dti-title); font-weight:750; font-size:16px; line-height:1.25; } .g1-d-training-inference-tools .ti-body{ margin:0; color:var(–g1dti-sub); font-size:13.5px; line-height:1.6; } @media (max-width:768px){ .g1-d-training-inference-tools{ padding:26px 16px; } .g1-d-training-inference-tools .ti-grid{ grid-template-columns:1fr; } .g1-d-training-inference-tools .ti-card{ padding:var(–g1dti-card-pad-m); } } #g1d-inference-pipeline{ width:100%; background:var(–g1dinf-bg); padding:var(–g1dinf-pad-y) var(–g1dinf-pad-x); border-radius:var(–g1dinf-radius); overflow:hidden; box-sizing:border-box; } #g1d-inference-pipeline, #g1d-inference-pipeline *{ box-sizing:border-box; } #g1d-inference-pipeline .rs-inf-inner{ max-width:var(–g1dinf-inner-max); margin:0 auto; font-family:system-ui,-apple-system,Segoe UI,Roboto,Arial,sans-serif; color:var(–g1dinf-text); } #g1d-inference-pipeline .rs-inf-titlewrap{ text-align:center; margin:0 0 18px; } #g1d-inference-pipeline .rs-inf-title{ display:inline-block; background:var(–g1dinf-accent); color:#fff; font-weight:700; font-size:14px; line-height:1; padding:8px 14px; border-radius:999px; } #g1d-inference-pipeline .rs-inf-radio{ position:absolute; left:-9999px; opacity:0; pointer-events:none; } #g1d-inference-pipeline .rs-inf-steps{ list-style:none; display:flex; justify-content:space-between; align-items:flex-start; gap:10px; padding:0; margin:0 auto 18px; position:relative; max-width:980px; } /* dotted connector line (MATCH data-pipeline) */ #g1d-inference-pipeline .rs-inf-steps::before{ content:””; position:absolute; left:4%; right:4%; top:14px; height:0; border-top:2px dashed var(–g1dinf-line); z-index:0; } #g1d-inference-pipeline .rs-inf-step{ flex:1; min-width:0; text-align:center; position:relative; z-index:1; } #g1d-inference-pipeline .rs-inf-dot{ width:28px;height:28px;border-radius:999px; margin:0 auto 6px; display:grid;place-items:center; font-weight:800;font-size:13px; color:#fff; background:var(–g1dinf-muted); box-shadow:0 1px 0 rgba(0,0,0,.08); } #g1d-inference-pipeline .rs-inf-label{ font-size:12px; line-height:1.15; color:var(–g1dinf-muted); font-weight:600; } #g1d-inference-pipeline .rs-inf-stage{ position:relative; max-width:var(–g1dinf-imgw); margin:0 auto; } #g1d-inference-pipeline .rs-inf-imgwrap{ position:relative; width:100%; margin:0 auto; } #g1d-inference-pipeline .rs-inf-imgwrap::before{ content:””; display:block; padding-top:var(–g1dinf-imgH); } #g1d-inference-pipeline .rs-inf-imgwrap img{ position:absolute; inset:0; width:100%; height:100%; object-fit:contain; opacity:0; transition:opacity .18s ease-in-out; will-change:opacity; } #g1d-inference-pipeline .rs-inf-arrow{ position:absolute; top:50%; transform:translateY(-50%); width:var(–g1dinf-arrow); height:var(–g1dinf-arrow); border-radius:999px; border:1px solid var(–g1dinf-line); background:#fff; box-shadow:0 1px 0 rgba(0,0,0,.06); display:none; align-items:center; justify-content:center; cursor:pointer; user-select:none; z-index:3; } #g1d-inference-pipeline .rs-inf-arrow span{ font-size:22px; line-height:1; color:#111; } #g1d-inference-pipeline .rs-inf-arrow:hover{ filter:brightness(.98); } #g1d-inference-pipeline .rs-inf-arrow:active{ transform:translateY(-50%) scale(.98); } #g1d-inference-pipeline .rs-inf-arrow.prev{ left:-58px; } #g1d-inference-pipeline .rs-inf-arrow.next{ right:-58px; } /* Active highlight (unique IDs) */ #g1d-inference-pipeline #g1dinf-s1:checked ~ .rs-inf-steps .s1 .rs-inf-dot, #g1d-inference-pipeline #g1dinf-s2:checked ~ .rs-inf-steps .s2 .rs-inf-dot, #g1d-inference-pipeline #g1dinf-s3:checked ~ .rs-inf-steps .s3 .rs-inf-dot, #g1d-inference-pipeline #g1dinf-s4:checked ~ .rs-inf-steps .s4 .rs-inf-dot, #g1d-inference-pipeline #g1dinf-s5:checked ~ .rs-inf-steps .s5 .rs-inf-dot, #g1d-inference-pipeline #g1dinf-s6:checked ~ .rs-inf-steps .s6 .rs-inf-dot{ background:var(–g1dinf-accent); } #g1d-inference-pipeline #g1dinf-s1:checked ~ .rs-inf-steps .s1 .rs-inf-label, #g1d-inference-pipeline #g1dinf-s2:checked ~ .rs-inf-steps .s2 .rs-inf-label, #g1d-inference-pipeline #g1dinf-s3:checked ~ .rs-inf-steps .s3 .rs-inf-label, #g1d-inference-pipeline #g1dinf-s4:checked ~ .rs-inf-steps .s4 .rs-inf-label, #g1d-inference-pipeline #g1dinf-s5:checked ~ .rs-inf-steps .s5 .rs-inf-label, #g1d-inference-pipeline #g1dinf-s6:checked ~ .rs-inf-steps .s6 .rs-inf-label{ color:var(–g1dinf-text); } /* Show selected image */ #g1d-inference-pipeline #g1dinf-s1:checked ~ .rs-inf-stage .img1{ opacity:1; } #g1d-inference-pipeline #g1dinf-s2:checked ~ .rs-inf-stage .img2{ opacity:1; } #g1d-inference-pipeline #g1dinf-s3:checked ~ .rs-inf-stage .img3{ opacity:1; } #g1d-inference-pipeline #g1dinf-s4:checked ~ .rs-inf-stage .img4{ opacity:1; } #g1d-inference-pipeline #g1dinf-s5:checked ~ .rs-inf-stage .img5{ opacity:1; } #g1d-inference-pipeline #g1dinf-s6:checked ~ .rs-inf-stage .img6{ opacity:1; } /* Show correct arrows */ #g1d-inference-pipeline #g1dinf-s1:checked ~ .rs-inf-stage .prev.p1, #g1d-inference-pipeline #g1dinf-s1:checked ~ .rs-inf-stage .next.n1{ display:flex; } #g1d-inference-pipeline #g1dinf-s2:checked ~ .rs-inf-stage .prev.p2, #g1d-inference-pipeline #g1dinf-s2:checked ~ .rs-inf-stage .next.n2{ display:flex; } #g1d-inference-pipeline #g1dinf-s3:checked ~ .rs-inf-stage .prev.p3, #g1d-inference-pipeline #g1dinf-s3:checked ~ .rs-inf-stage .next.n3{ display:flex; } #g1d-inference-pipeline #g1dinf-s4:checked ~ .rs-inf-stage .prev.p4, #g1d-inference-pipeline #g1dinf-s4:checked ~ .rs-inf-stage .next.n4{ display:flex; } #g1d-inference-pipeline #g1dinf-s5:checked ~ .rs-inf-stage .prev.p5, #g1d-inference-pipeline #g1dinf-s5:checked ~ .rs-inf-stage .next.n5{ display:flex; } #g1d-inference-pipeline #g1dinf-s6:checked ~ .rs-inf-stage .prev.p6, #g1d-inference-pipeline #g1dinf-s6:checked ~ .rs-inf-stage .next.n6{ display:flex; } @media (max-width:720px){ #g1d-inference-pipeline .rs-inf-steps{ gap:6px; } #g1d-inference-pipeline .rs-inf-label{ font-size:11px; } #g1d-inference-pipeline .rs-inf-arrow.prev{ left:8px; } #g1d-inference-pipeline .rs-inf-arrow.next{ right:8px; } } Model Training & Deployment Workflow
- 1 Choose
Model
Architecture - 2 Set Training
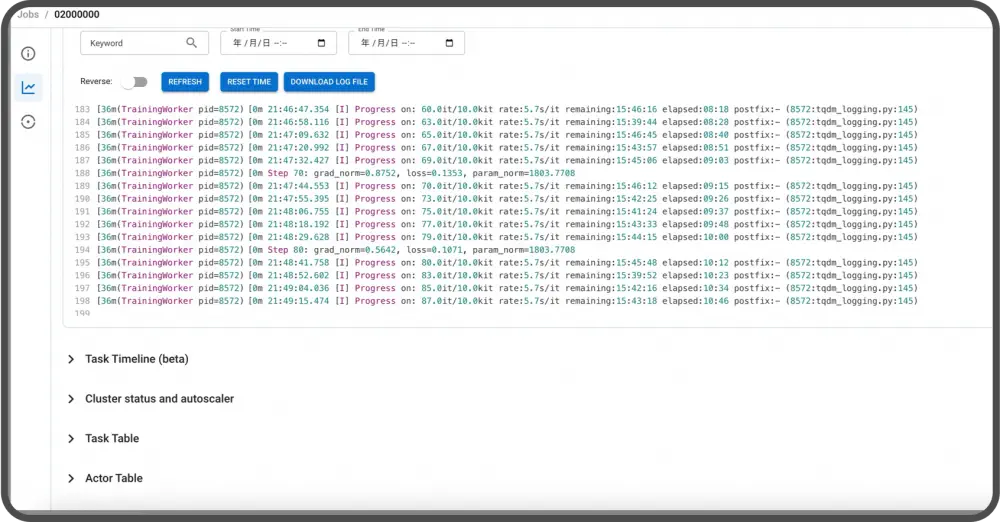
Configuration - 3 Live Training
Monitoring - 4 Parameter
Tuning - 5 Run Simulation
Tests - 6 Export & Deploy
Model

Application Scenario

Service

Life

Retail

Industry
/* ========================================================= Application Scenario (TRICKY FIX KEPT) – No “dead space” when hovering gaps (flex-grow weights) – Variables are block-prefixed: –g1dappsc-* – Selectors remain scoped under .unitree-g1-d-application-scenario ========================================================= */ .unitree-g1-d-application-scenario .rs-appsc-title{ margin:28px 0 18px; text-align:center; font:500 clamp(28px, 3.2vw, 44px)/1.15 system-ui,-apple-system,Segoe UI,Roboto,Arial,sans-serif; color:var(–g1dappsc-title, #111) !important; } .unitree-g1-d-application-scenario .rs-appsc-panels{ display:flex !important; gap:var(–g1dappsc-gap, 10px); width:100%; height:var(–g1dappsc-h, 360px); align-items:stretch; min-width:0; line-height:0 !important; } .unitree-g1-d-application-scenario .rs-appsc-panel{ position:relative; min-width:0; overflow:hidden; border-radius:var(–g1dappsc-radius, 15px); height:100%; display:block; box-sizing:border-box; isolation:isolate; /* IMPORTANT: allow flex to fill remaining space (prevents gaps/blank area) */ flex:1 1 0%; margin:0 !important; padding:0 !important; border:0 !important; outline:0 !important; background:transparent !important; box-shadow:none !important; background-image:none !important; } .unitree-g1-d-application-scenario .rs-appsc-img{ position:absolute; inset:0 !important; width:100% !important; height:100% !important; display:block !important; margin:0 !important; padding:0 !important; border:0 !important; object-fit:cover; pointer-events:none; transform:scale(1) !important; transition:transform 600ms ease; } .unitree-g1-d-application-scenario .rs-appsc-panel::after{ content:””; position:absolute; inset:0; z-index:1; pointer-events:none; background:linear-gradient(90deg, rgba(0,0,0,.55), rgba(0,0,0,.15)); opacity:.75; transition:opacity 420ms ease; } .unitree-g1-d-application-scenario .rs-appsc-label{ position:absolute; top:14px; left:14px; z-index:2; pointer-events:none; margin:0 !important; font:600 22px/1.1 system-ui,-apple-system,Segoe UI,Roboto,Arial,sans-serif; color:#fff !important; text-shadow:0 2px 14px rgba(0,0,0,.55); } /* Desktop hover-expand (NO blank space when mouse is in the gap) */ @media (hover:hover) and (pointer:fine){ .unitree-g1-d-application-scenario .rs-appsc-panel{ /* smooth width changes */ transition:flex-grow 420ms ease, filter 420ms ease !important; will-change:flex-grow; } /* When hovering the whole row: dim all panels, but KEEP widths filling 100% */ .unitree-g1-d-application-scenario .rs-appsc-panels:hover .rs-appsc-panel{ filter:brightness(.55); flex-grow:3; /* baseline weight */ } /* Hovered panel gets bigger (11 / (11+3+3+3) = 55%) */ .unitree-g1-d-application-scenario .rs-appsc-panels:hover .rs-appsc-panel:hover{ filter:brightness(1); flex-grow:11; } .unitree-g1-d-application-scenario .rs-appsc-panels:hover .rs-appsc-panel:hover::after{ opacity:.35; } /* Zoom toggle (was style*=”–rs-appsc-zoom:X”) */ .unitree-g1-d-application-scenario[style*=”–g1dappsc-zoom:1″] .rs-appsc-panels:hover .rs-appsc-panel:hover .rs-appsc-img{ transform:scale(1.08) !important; } .unitree-g1-d-application-scenario[style*=”–g1dappsc-zoom:0″] .rs-appsc-panels:hover .rs-appsc-panel:hover .rs-appsc-img{ transform:scale(1) !important; } } /* Responsive layout */ @media (max-width:820px){ .unitree-g1-d-application-scenario .rs-appsc-panels{ display:grid !important; grid-template-columns:1fr 1fr; height:auto; line-height:normal !important; } .unitree-g1-d-application-scenario .rs-appsc-panel{ height:auto; min-height:170px; } } @media (max-width:520px){ .unitree-g1-d-application-scenario .rs-appsc-panels{ grid-template-columns:1fr; } .unitree-g1-d-application-scenario .rs-appsc-panel{ min-height:200px; } } @media (prefers-reduced-motion:reduce){ .unitree-g1-d-application-scenario .rs-appsc-panel, .unitree-g1-d-application-scenario .rs-appsc-img, .unitree-g1-d-application-scenario .rs-appsc-panel::after{ transition:none !important; } } .rs-section.initree-g1-d-world-model-action{ /* Match your other light blocks (gray background, no outer border) */ –g1d-wma-bg:#f8f8f8; –g1d-wma-ink:#0b1220; –g1d-wma-muted:rgba(11,18,32,.62); –g1d-wma-radius:15px; –g1d-wma-pad:16px; –g1d-wma-gap:26px; –g1d-wma-gap-sm:16px; –g1d-wma-hero-title:clamp(22px,3.2vw,34px); –g1d-wma-hero-lead:clamp(13px,1.45vw,15px); –g1d-wma-h3:clamp(18px,2.2vw,26px); –g1d-wma-body:14px; –g1d-wma-media-radius:14px; /* NEW: content max width (background stays full width) */ –g1d-wma-max:1140px; font-family:system-ui,-apple-system,Segoe UI,Roboto,Arial,sans-serif; color:var(–g1d-wma-ink); background:transparent; width:100%; } .rs-section.initree-g1-d-world-model-action, .rs-section.initree-g1-d-world-model-action *{ box-sizing:border-box; } /* Live theme neutralizers (scoped) */ .rs-section.initree-g1-d-world-model-action hr{ display:none !important; } .rs-section.initree-g1-d-world-model-action table, .rs-section.initree-g1-d-world-model-action tbody, .rs-section.initree-g1-d-world-model-action tr, .rs-section.initree-g1-d-world-model-action td{ border:0 !important; box-shadow:none !important; background-image:none !important; outline:0 !important; border-collapse:collapse !important; border-spacing:0 !important; } /* Background container stays full width */ .rs-section.initree-g1-d-world-model-action .g1d-wma-wrap{ background:var(–g1d-wma-bg); border:0 !important; box-shadow:none !important; border-radius:var(–g1d-wma-radius); overflow:hidden; width:100%; } /* Center ONLY the content */ .rs-section.initree-g1-d-world-model-action .g1d-wma-inner{ max-width:var(–g1d-wma-max); margin-left:auto; margin-right:auto; padding:var(–g1d-wma-pad); } /* Centered hero block */ .rs-section.initree-g1-d-world-model-action .g1d-wma-hero{ text-align:center; padding:2px 4px 10px 4px; border-bottom:1px solid rgba(11,18,32,.10); margin:0 0 var(–g1d-wma-gap) 0; } .rs-section.initree-g1-d-world-model-action .g1d-wma-heroTitle{ margin:0 !important; font-weight:950; letter-spacing:.2px; font-size:var(–g1d-wma-hero-title); line-height:1.12; color:var(–g1d-wma-ink) !important; } .rs-section.initree-g1-d-world-model-action .g1d-wma-lead{ margin:10px auto 0 auto !important; max-width:980px; font-size:var(–g1d-wma-hero-lead); line-height:1.45; color:var(–g1d-wma-muted) !important; } .rs-section.initree-g1-d-world-model-action .g1d-wma-rows{ display:flex; flex-direction:column; gap:var(–g1d-wma-gap); } .rs-section.initree-g1-d-world-model-action .g1d-wma-row{ display:flex; align-items:center; justify-content:space-between; gap:var(–g1d-wma-gap); } .rs-section.initree-g1-d-world-model-action .g1d-wma-row[data-order=”reverse”]{ flex-direction:row-reverse; } .rs-section.initree-g1-d-world-model-action .g1d-wma-text{ flex:1 1 44%; min-width:0; } .rs-section.initree-g1-d-world-model-action .g1d-wma-h3{ margin:0 !important; font-weight:950; font-size:var(–g1d-wma-h3); line-height:1.12; letter-spacing:.2px; color:var(–g1d-wma-ink) !important; } .rs-section.initree-g1-d-world-model-action .g1d-wma-p{ margin:10px 0 0 0 !important; font-size:var(–g1d-wma-body); line-height:1.55; color:var(–g1d-wma-muted) !important; } .rs-section.initree-g1-d-world-model-action .g1d-wma-media{ flex:1 1 56%; min-width:0; } /* Media box: 16:9 */ .rs-section.initree-g1-d-world-model-action .g1d-wma-mediaBox{ position:relative; border-radius:var(–g1d-wma-media-radius); overflow:hidden; background:#000; border:0 !important; box-shadow:none !important; line-height:0; aspect-ratio:16 / 9; } .rs-section.initree-g1-d-world-model-action .g1d-wma-img, .rs-section.initree-g1-d-world-model-action .g1d-wma-video{ position:absolute !important; inset:0 !important; display:block !important; width:100% !important; height:100% !important; max-width:100% !important; border:0 !important; margin:0 !important; padding:0 !important; } .rs-section.initree-g1-d-world-model-action .g1d-wma-img{ object-fit:cover; } .rs-section.initree-g1-d-world-model-action .g1d-wma-video{ object-fit:cover; background:#000; } @media (max-width: 980px){ .rs-section.initree-g1-d-world-model-action .g1d-wma-row{ gap:20px; } } @media (max-width: 780px){ .rs-section.initree-g1-d-world-model-action .g1d-wma-inner{ padding:14px; } .rs-section.initree-g1-d-world-model-action .g1d-wma-row, .rs-section.initree-g1-d-world-model-action .g1d-wma-row[data-order=”reverse”]{ flex-direction:column; align-items:stretch; gap:var(–g1d-wma-gap-sm); } }UnifoLM-WMA-0:
An Open World-Model-Action (WMA) FrameworkUnifoLM-WMA-0 is Unitree’s open-source world-model-action architecture across multiple robotic embodiments, built to support general-purpose robot learning. At its core is a world model that learns to interpret physical interactions between robots and the environments they operate in.Decision-Making Mode:
Action Generation Guided by
Accurate PredictionUsing the current scene state and the task goal, the system forecasts upcoming physical interactions between the robot and its surroundings. These predictions help the policy module select actions, minimizing decision drift while improving the precision and consistency of motion execution. Simulation Mode:
Simulation Mode:
High-Fidelity Feedback for Data
SynthesisIt can also operate as an interactive simulator, generating high-fidelity environmental feedback from robot motion inputs. By producing realistic synthetic data, it becomes a strong source for model training and policy refinement—helping speed up learning and iteration.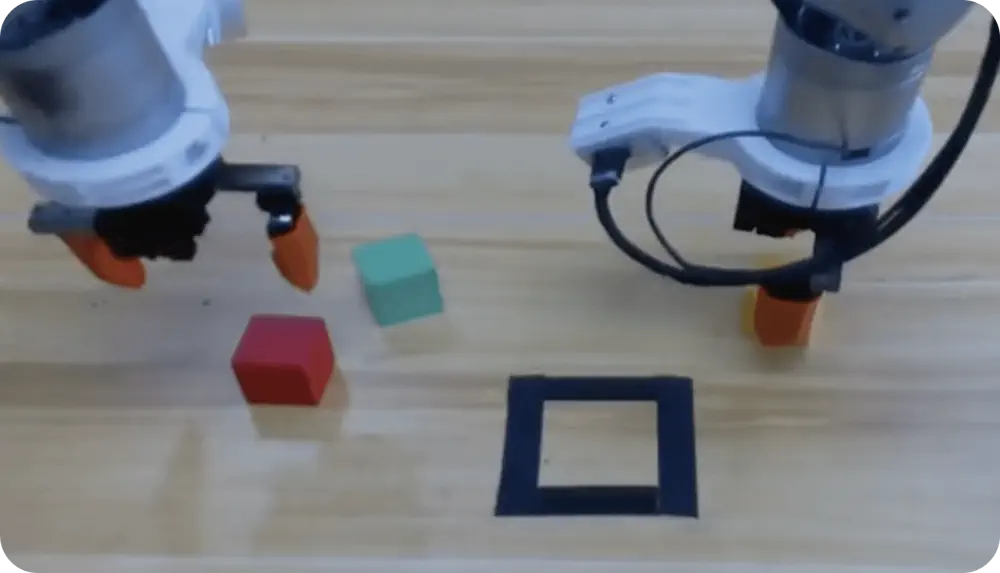 .rs-g1d-inc{ –g1d-inc-bg:#f8f8f8; –g1d-inc-line:rgba(11,18,32,.14); –g1d-inc-txt:#0b1220; –g1d-inc-muted:rgba(11,18,32,.70); –g1d-inc-accent:#00446a; –g1d-inc-radius:15px; –g1d-inc-pad:16px; /* change this if you want more/less indent */ –g1d-inc-indent:18px; font-family:system-ui,-apple-system,Segoe UI,Roboto,Arial,sans-serif; color:var(–g1d-inc-txt); } .rs-g1d-inc, .rs-g1d-inc *{ box-sizing:border-box; } .rs-g1d-inc .wrap{ border-radius:var(–g1d-inc-radius); background:var(–g1d-inc-bg); border:0; box-shadow:none; overflow:hidden; padding:var(–g1d-inc-pad); } /* First line (same as your Dimensions block) */ .rs-g1d-inc .titlebar{ display:flex; align-items:flex-end; justify-content:space-between; gap:12px; margin:0 0 12px 0; padding:0 0 10px 0; border-bottom:1px solid rgba(11,18,32,.10); } .rs-g1d-inc .title{ margin:0 !important; font-size:clamp(16px,2vw,18px); font-weight:900; color:var(–g1d-inc-txt) !important; letter-spacing:.2px; } .rs-g1d-inc .badge{ margin:0 !important; color:var(–g1d-inc-muted) !important; font-weight:800; font-size:12px; letter-spacing:.2px; white-space:nowrap; } .rs-g1d-inc .badge b{ color:var(–g1d-inc-accent); } /* Card */ .rs-g1d-inc .card{ border:1px solid rgba(11,18,32,.14); border-radius:12px; background:#ffffff; padding:12px; min-width:0; } .rs-g1d-inc .rowhead{ display:flex; align-items:center; gap:10px; margin:0 0 10px 0; } /* (icon removed) */ .rs-g1d-inc .label{ margin:0 !important; font-weight:900; letter-spacing:.2px; text-transform:uppercase; font-size:13px; color:rgba(11,18,32,.70) !important; } /* Bullet list: TABLE is the most WYSIWYG-proof way */ .rs-g1d-inc .bul{ width:100%; border-collapse:collapse !important; border-spacing:0 !important; border:0 !important; margin:0; box-shadow:none !important; background-image:none !important; outline:0 !important; } .rs-g1d-inc .bul tbody, .rs-g1d-inc .bul tr, .rs-g1d-inc .bul td{ border:0 !important; box-shadow:none !important; background-image:none !important; outline:0 !important; } .rs-g1d-inc .bul td{ padding:0; vertical-align:top; } .rs-g1d-inc .bul .b{ width:var(–g1d-inc-indent); padding-right:10px; color:rgba(11,18,32,.35); font-size:16px; line-height:1.25; } .rs-g1d-inc .bul .t{ font-weight:700; line-height:1.25; color:var(–g1d-inc-txt); padding-bottom:6px; } .rs-g1d-inc .bul tr:last-child .t{ padding-bottom:0; } .rs-g1d-inc .note{ margin:10px 0 0 0; color:var(–g1d-inc-muted); font-size:12px; line-height:1.35; } @media (max-width: 640px){ .rs-g1d-inc .wrap{ padding:14px; } }Unitree G1-D Standard D
.rs-g1d-inc{ –g1d-inc-bg:#f8f8f8; –g1d-inc-line:rgba(11,18,32,.14); –g1d-inc-txt:#0b1220; –g1d-inc-muted:rgba(11,18,32,.70); –g1d-inc-accent:#00446a; –g1d-inc-radius:15px; –g1d-inc-pad:16px; /* change this if you want more/less indent */ –g1d-inc-indent:18px; font-family:system-ui,-apple-system,Segoe UI,Roboto,Arial,sans-serif; color:var(–g1d-inc-txt); } .rs-g1d-inc, .rs-g1d-inc *{ box-sizing:border-box; } .rs-g1d-inc .wrap{ border-radius:var(–g1d-inc-radius); background:var(–g1d-inc-bg); border:0; box-shadow:none; overflow:hidden; padding:var(–g1d-inc-pad); } /* First line (same as your Dimensions block) */ .rs-g1d-inc .titlebar{ display:flex; align-items:flex-end; justify-content:space-between; gap:12px; margin:0 0 12px 0; padding:0 0 10px 0; border-bottom:1px solid rgba(11,18,32,.10); } .rs-g1d-inc .title{ margin:0 !important; font-size:clamp(16px,2vw,18px); font-weight:900; color:var(–g1d-inc-txt) !important; letter-spacing:.2px; } .rs-g1d-inc .badge{ margin:0 !important; color:var(–g1d-inc-muted) !important; font-weight:800; font-size:12px; letter-spacing:.2px; white-space:nowrap; } .rs-g1d-inc .badge b{ color:var(–g1d-inc-accent); } /* Card */ .rs-g1d-inc .card{ border:1px solid rgba(11,18,32,.14); border-radius:12px; background:#ffffff; padding:12px; min-width:0; } .rs-g1d-inc .rowhead{ display:flex; align-items:center; gap:10px; margin:0 0 10px 0; } /* (icon removed) */ .rs-g1d-inc .label{ margin:0 !important; font-weight:900; letter-spacing:.2px; text-transform:uppercase; font-size:13px; color:rgba(11,18,32,.70) !important; } /* Bullet list: TABLE is the most WYSIWYG-proof way */ .rs-g1d-inc .bul{ width:100%; border-collapse:collapse !important; border-spacing:0 !important; border:0 !important; margin:0; box-shadow:none !important; background-image:none !important; outline:0 !important; } .rs-g1d-inc .bul tbody, .rs-g1d-inc .bul tr, .rs-g1d-inc .bul td{ border:0 !important; box-shadow:none !important; background-image:none !important; outline:0 !important; } .rs-g1d-inc .bul td{ padding:0; vertical-align:top; } .rs-g1d-inc .bul .b{ width:var(–g1d-inc-indent); padding-right:10px; color:rgba(11,18,32,.35); font-size:16px; line-height:1.25; } .rs-g1d-inc .bul .t{ font-weight:700; line-height:1.25; color:var(–g1d-inc-txt); padding-bottom:6px; } .rs-g1d-inc .bul tr:last-child .t{ padding-bottom:0; } .rs-g1d-inc .note{ margin:10px 0 0 0; color:var(–g1d-inc-muted); font-size:12px; line-height:1.35; } @media (max-width: 640px){ .rs-g1d-inc .wrap{ padding:14px; } }Unitree G1-D Standard D
Model: G1-D-U4
Included
| • | G1-D-U4 robot (fixed-base dual-arm) |
| • | Smart battery (quick-release) 9000mAh |
| • | Main unit charger 54V 5A |
| • | Handheld remote controller |
| • | BrainCo five-finger dexterous hands (Revo 2 Basic Edition; includes RGB camera) x2 |
Package contents vary by configuration.
.rs-g1d-dims{ –g1d-dims-bg:#f8f8f8; –g1d-dims-line:rgba(11,18,32,.14); –g1d-dims-txt:#0b1220; –g1d-dims-muted:rgba(11,18,32,.70); –g1d-dims-accent:#00446a; –g1d-dims-radius:15px; –g1d-dims-pad:16px; /* bullet indent like What’s Included */ –g1d-dims-indent:18px; font-family:system-ui,-apple-system,Segoe UI,Roboto,Arial,sans-serif; color:var(–g1d-dims-txt); } .rs-g1d-dims, .rs-g1d-dims *{ box-sizing:border-box; } .rs-g1d-dims .wrap{ border-radius:var(–g1d-dims-radius); background:var(–g1d-dims-bg); border:0; box-shadow:none; overflow:hidden; padding:var(–g1d-dims-pad); } .rs-g1d-dims .titlebar{ display:flex; align-items:flex-end; justify-content:space-between; gap:12px; margin:0 0 12px 0; padding:0 0 10px 0; border-bottom:1px solid rgba(11,18,32,.10); } .rs-g1d-dims .title{ margin:0 !important; font-size:clamp(16px,2vw,18px); font-weight:900; color:var(–g1d-dims-txt) !important; letter-spacing:.2px; } .rs-g1d-dims .badge{ margin:0 !important; color:var(–g1d-dims-muted) !important; font-weight:800; font-size:12px; letter-spacing:.2px; white-space:nowrap; } .rs-g1d-dims .badge b{ color:var(–g1d-dims-accent); } .rs-g1d-dims .hi{ display:grid; grid-template-columns:repeat(12,minmax(0,1fr)); gap:10px; } .rs-g1d-dims .tile{ grid-column:span 6; border:1px solid rgba(11,18,32,.14); border-radius:12px; background:#ffffff; padding:12px; min-width:0; } /* Tile title (no heading tags) */ .rs-g1d-dims .tile b{ display:block; font-size:14px; letter-spacing:.2px; color:rgba(11,18,32,.65); margin-bottom:8px; line-height:1.15; font-weight:900; text-transform:uppercase; } /* VALUE line: bullet + EXACT text rules as What’s Included */ .rs-g1d-dims .bul{ width:100%; border-collapse:collapse !important; border-spacing:0 !important; border:0 !important; margin:0; box-shadow:none !important; background-image:none !important; outline:0 !important; } .rs-g1d-dims .bul tbody, .rs-g1d-dims .bul tr, .rs-g1d-dims .bul td{ border:0 !important; box-shadow:none !important; background-image:none !important; outline:0 !important; } .rs-g1d-dims .bul td{ padding:0; vertical-align:top; } .rs-g1d-dims .bul .b{ width:var(–g1d-dims-indent); padding-right:10px; color:rgba(11,18,32,.35); font-size:16px; line-height:1.25; } .rs-g1d-dims .bul .t{ font-weight:700; line-height:1.25; color:var(–g1d-dims-txt); } .rs-g1d-dims .note{ margin:10px 0 0 0; color:var(–g1d-dims-muted); font-size:12px; line-height:1.35; } @media (max-width: 640px){ .rs-g1d-dims .wrap{ padding:14px; } .rs-g1d-dims .tile{ grid-column:1 / -1; } }Unitree G1-D Standard D
Model: G1-D-U4
Minimum Height
| • | 1260 × 500 × 500 mm |
Maximum Height
| • | 1680 × 500 × 500 mm |
Weight with Battery
| • | Approx. 50kg |
Values shown are the overall dimensions at minimum and maximum column height.
.rs-g1d-spechigh{ /* MATCH your light blocks */ –g1d-spechigh-bg:#f8f8f8; –g1d-spechigh-line:rgba(11,18,32,.14); –g1d-spechigh-txt:#0b1220; –g1d-spechigh-muted:rgba(11,18,32,.70); –g1d-spechigh-accent:#00446a; –g1d-spechigh-radius:15px; –g1d-spechigh-pad:16px; /* bullet indent (same idea as What’s Included) */ –g1d-spechigh-indent:18px; font-family:system-ui,-apple-system,Segoe UI,Roboto,Arial,sans-serif; color:var(–g1d-spechigh-txt); } .rs-g1d-spechigh, .rs-g1d-spechigh *{ box-sizing:border-box; } .rs-g1d-spechigh .wrap{ border-radius:var(–g1d-spechigh-radius); background:var(–g1d-spechigh-bg); border:0; box-shadow:none; overflow:hidden; padding:var(–g1d-spechigh-pad); } /* Title line (same structure as your other blocks) */ .rs-g1d-spechigh .titlebar{ display:flex; align-items:flex-end; justify-content:space-between; gap:12px; margin:0 0 12px 0; padding:0 0 10px 0; border-bottom:1px solid rgba(11,18,32,.10); } .rs-g1d-spechigh .title{ margin:0 !important; font-size:clamp(16px,2vw,18px); font-weight:900; color:var(–g1d-spechigh-txt) !important; letter-spacing:.2px; } .rs-g1d-spechigh .badge{ margin:0 !important; color:var(–g1d-spechigh-muted) !important; font-weight:800; font-size:12px; letter-spacing:.2px; white-space:nowrap; } .rs-g1d-spechigh .badge b{ color:var(–g1d-spechigh-accent); } /* Section label */ .rs-g1d-spechigh .sectionlabel{ margin:12px 0 6px 0; font-size:12px; color:var(–g1d-spechigh-muted); letter-spacing:.25px; font-weight:900; text-transform:uppercase; } /* Top highlights (4 blocks) */ .rs-g1d-spechigh .hi{ display:grid; grid-template-columns:repeat(12,minmax(0,1fr)); gap:10px; margin:10px 0 10px 0; } .rs-g1d-spechigh .tile{ grid-column:span 3; border:1px solid rgba(11,18,32,.14); border-radius:12px; background:#ffffff; padding:12px; min-width:0; } /* Title in tile */ .rs-g1d-spechigh .tile b{ display:block; font-size:14px; letter-spacing:.2px; color:rgba(11,18,32,.65); margin:0 0 8px 0; line-height:1.15; font-weight:900; text-transform:uppercase; } /* Bullet line in tile (match What’s Included exactly) */ .rs-g1d-spechigh .bul{ width:100%; border-collapse:collapse !important; border-spacing:0 !important; border:0 !important; margin:0; box-shadow:none !important; background-image:none !important; outline:0 !important; } .rs-g1d-spechigh .bul tbody, .rs-g1d-spechigh .bul tr, .rs-g1d-spechigh .bul td{ border:0 !important; box-shadow:none !important; background-image:none !important; outline:0 !important; } .rs-g1d-spechigh .bul td{ padding:0; vertical-align:top; } .rs-g1d-spechigh .bul .b{ width:var(–g1d-spechigh-indent); padding-right:10px; color:rgba(11,18,32,.35); font-size:16px; line-height:1.25; } .rs-g1d-spechigh .bul .t{ font-weight:700; line-height:1.25; color:var(–g1d-spechigh-txt); padding-bottom:0; overflow-wrap:anywhere; } /* Bottom standard spec rows */ .rs-g1d-spechigh .rows{ border-top:1px solid rgba(11,18,32,.10); margin-top:10px; padding-top:10px; } /* KEY + (2 VALUE COLUMNS) */ .rs-g1d-spechigh .row{ display:grid; grid-template-columns:1.2fr 1fr; gap:14px; padding:10px 0; border-bottom:1px solid rgba(11,18,32,.08); } .rs-g1d-spechigh .row:last-child{ border-bottom:none; } .rs-g1d-spechigh .k{ color:var(–g1d-spechigh-muted); font-weight:800; } .rs-g1d-spechigh .vals{ display:grid; grid-template-columns:1fr 1fr; gap:14px; min-width:0; } .rs-g1d-spechigh .v{ color:var(–g1d-spechigh-txt); font-weight:700; overflow-wrap:anywhere; min-width:0; } .rs-g1d-spechigh .muted{ color:var(–g1d-spechigh-muted); font-weight:700; } /* Column labels (hidden on desktop, shown on mobile) */ .rs-g1d-spechigh .lab{ display:none; font-size:11px; font-weight:900; letter-spacing:.25px; text-transform:uppercase; color:var(–g1d-spechigh-muted); margin:0 0 4px 0; } /* Optional: a subtle “header” row for the two columns */ .rs-g1d-spechigh .row.colhead{ padding:6px 0 10px; border-bottom:1px solid rgba(11,18,32,.10); } .rs-g1d-spechigh .row.colhead .k{ color:transparent; } .rs-g1d-spechigh .colh{ font-weight:900; text-transform:uppercase; letter-spacing:.25px; font-size:12px; color:rgba(11,18,32,.65); } @media (max-width: 980px){ .rs-g1d-spechigh .tile{ grid-column:span 6; } } @media (max-width: 640px){ .rs-g1d-spechigh .wrap{ padding:14px; } .rs-g1d-spechigh .tile{ grid-column:1 / -1; } .rs-g1d-spechigh .row{ grid-template-columns:1fr; gap:6px; } .rs-g1d-spechigh .vals{ grid-template-columns:1fr; gap:10px; } .rs-g1d-spechigh .row.colhead{ display:none; } .rs-g1d-spechigh .lab{ display:block; } }Unitree G1-D Standard D
Models: G1-D-U4
Model SpecificHands
| • | BrainCo five-finger dexterous hands (Revo 2 Basic Edition) |
Base
| • | Regular caster wheel base |
Compute Module
| • | Jetson Orin NX 16GB (100TOPS) |
Sensors
| • | Head HD Binocular (*1) & Wrist HD Camera (*2) |
Specifications StandardUltimateOverall Dimensions (Min. Column Height)Standard1260×500×500mmUltimate1260×525×570mmOverall Dimensions (Max. Column Height)Standard1680×500×500mmUltimate1680×525×570mmTotal Weight (incl. battery)StandardApprox. 50kgUltimateApprox. 80kgTotal DOF (excl. End Effector)Standard17Ultimate19Single Arm DOF (excl. End Effector)Standard7Ultimate7Max. Single Arm Payload [1]StandardApprox. 3kgUltimateApprox. 3kgEnd Effector Options [2]StandardOptional 2-Finger Gripper / 3-Finger Dexterous Hand (No Tactile) / 3-Finger Dexterous Hand (With Tactile) / 5-Finger Dexterous HandUltimateOptional 2-Finger Gripper / 3-Finger Dexterous Hand (No Tactile) / 3-Finger Dexterous Hand (With Tactile) / 5-Finger Dexterous HandWaist DOFStandard2Ultimate2Waist Joint Range of MotionStandardZ-axis: ±155°, Y-axis: -2.5° to +135°UltimateZ-axis: ±155°, Y-axis: -2.5° to +135°Column Lifting SpeedStandardApprox. 60mm/sUltimateApprox. 60mm/sMaximum Mobility SpeedStandard─Ultimate1.5m/sChassis Drive TypeStandard─UltimateDifferential drive, supports 360° in-place rotationChassis SensorsStandard─UltimateLiDAR ×1 + Depth Camera ×2 + Physical Collision Sensor ×2 + Low-Obstacle Detection Sensor ×2Basic Computing PowerStandard8-core High-performance CPUUltimate8-core High-performance CPUPerception SensorsStandardHead HD Binocular Camera ×1 + Wrist HD Camera ×2UltimateHead HD Binocular Camera ×1 + Wrist HD Camera ×2Wi-Fi 6 / Bluetooth 5.2Standard✓Ultimate✓High Computing Power ModuleStandardNVIDIA Jetson Orin NX 16GB (100TOPS)UltimateNVIDIA Jetson Orin NX 16GB (100TOPS)BatteryStandardUpper Body Battery (Quick-release): 9AhUltimateChassis Battery (Built-in): 30AhManual ControllerStandard✓Ultimate✓Visualization ComputerStandard✓Ultimate✓Battery LifeStandardApprox. 2 hoursUltimateApprox. 6 hoursUpgraded Intelligent OTAStandard✓Ultimate✓Secondary Development [3]Standard✓Ultimate✓
[1] The maximum load of the arm varies greatly under different arm extension postures.
[2] For end-effector selection, please contact our sales team.
[3] For more information, please read the secondary development manual.



Reviews
There are no reviews yet.